
 7
7

Microsoft Kinect SDK kit http://www.microsoft.com/en-us/download/details.aspx?id=40278
Toolkit Microsoft Kinect : http://www.microsoft.com/en-us/download/details.aspx?id=40276
The book i'm following : http://www.arduinoandkinectprojects.com/
ebook link : http://it-ebooks.info/book/761/
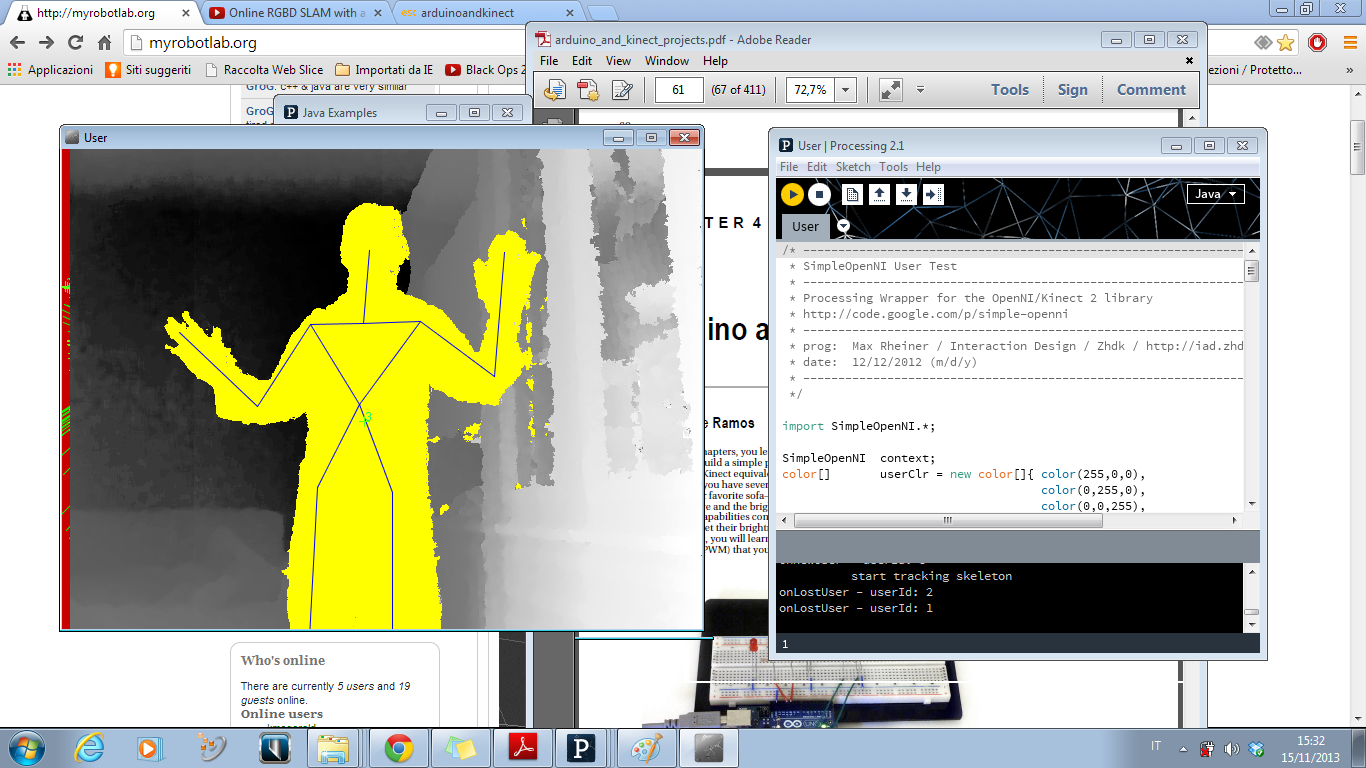
the processing library i'm using : https://code.google.com/p/simple-openni/
[[Servo.serial.py]]
We Need Video !
We Need Video !
Of course !!!! i'll make a
Of course !!!! i'll make a video as soon as i can control 2 servos, using x and y coordinates... !!!
Try something like this in
Try something like this in processing (make sure webgui is running on MRL)
Thanks grog...this worked
Thanks grog...this worked great :) now the problem is to put the int value X in that path (X instead of 20)...
How can i insert a variable in a string in that point??
Just figured out how to
Just figured out how to insert the X coordinate in that string...
This is Processing code i'm using... Grog suggested me to get rid of the serial communication and to use a RestAPI call to send servos the Servo.write(X) command... And it seems to work quite well...
String host = "127.0.0.1";
The Robot Trainer !
Nice video Ale !
I was really surprised at the speed, I thought the communication over the REST API would be slow.
When the system pauses, is it because the kinect has lost track?
Excited to see you grab and move a block without touching anything - need a gripper though ...
Great Work !