
I shortly explain the project dividing it in an hadware part and a software part.
The hardware is made by an access point wifi, an Arduino UNO with supported by an ethernet shield and another shield (to co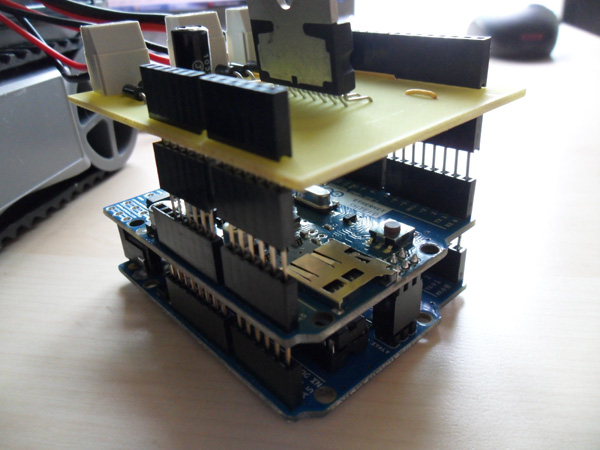 ntrol the motors) at all created on my own, an IP Camera (like the security ones), a motor based "car" and of course a PC to crontrol the rover.
ntrol the motors) at all created on my own, an IP Camera (like the security ones), a motor based "car" and of course a PC to crontrol the rover.
The software is on a "driving network" created with the access point, it's all connected with it: arduino and the ip camera by wires, and then the controller PC wireless.
The software is based on two different programs: the one uploaded on the arduino microcontroller, written in C, creates a server able to receive messages all the time from the controller; the one on the pc controller, written in Java, controls t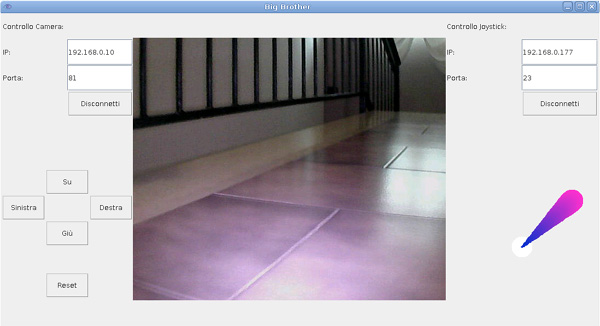 he rover movements communicating with the arduino (with a special Joystick applet), receives the camera's image 25 times each secont and controls the camera's rotation.
he rover movements communicating with the arduino (with a special Joystick applet), receives the camera's image 25 times each secont and controls the camera's rotation.
For more details visit the website (http://www.nicolalatella.it/bigbrother/) and browse in the code, i made it as much readable as i could!
Video Presentation of the project:
suggestions and comments? :)
Welcome Nicola !
Great robot !
If I remember correctly the Foscam IP Camera has mjpeg and mpeg4 output - are you using the mjpeg?
What are your future plans for this robot ?
Thanks!
i used the snapshot image i could get with a link, something like ip/snapshot.cgi and i refreshed that image 25 times each second, the same fps of the camera!
in future i'd have to reorganise the alimantation system, because now there are two different batteries on the bot, one for motors and one for all the rest.... and with one would be better!
hello nicola
hello nicola i find your projet randomly and i think nice projet and i was interesting and build a website like you thank you
Its great to see another
Its great to see another robot using Java ! MyRobotLab is primarily Java - would you be interested in using parts of MyRobotLab (MRL) in your project ? It's composed of a set of "services" - they are listed here on the download tab (http://myrobotlab.org/download)
Each service has its own page describing what it does .. for example http://myrobotlab.org/service/OpenCV
The documentation quality is not great, but we are working on it :)
Let us know if we can help in any way !
Regards,
GroG