TODO
- configurable reversable joysticks - with configurable deadzones
- fix publishRY RX missing
- Battery event @ C31
- InMoov services melded together with Joystick & Platform
References:
| how controller board is hooked up | |||
| Oct.19,2014 | |||
| note they don’t show AD 0 on board and they don’t show I/O 0 | |||
| looking at schematic channel 0 for a to d is pin 1 | |||
| channel | pin no. on cont. bd. | Eddie round robot description | Older square paltform |
| AD0 | 1 | left ir sensor 10 to 80cm | left ir sensor 10 to 80cm |
| AD1 | 2 | middle ir sensor 10 to 80cm | middle ir sensor 10 to 80cm |
| AD2 | 3 | right ir sensor 10 to 80cm | right ir sensor 10 to 80cm |
| AD3 | 4 | ||
| AD4 | 5 | ||
| AD5 | 6 | ||
| AD6 | 7 | ||
| AD7 | not available on pin | battery voltage aprox .039 to .041 v/bit 4096 bits | battery voltage aprox .039 to .041 v/bit 4096 bits |
| I/O 0 or P0 | 1 | left parallax ping .8in to 118in or 2cm to 3m | left radio shack ping range 1.2 in to 156in Or 3cm to 4m |
| I/O 1 or P1 | 2 | right parallax ping .8in to 118in or 2cm to 3m | right radio shack ping range 1.2 in to 156in Or 3cm to 4m |
| I/O 2 | 3 | ||
| I/O 3 | 4 | ||
| I/O 4 | 5 | ||
| I/O 5 | 6 | ||
| I/O 6 | 7 | hooked to prop-1 board for head lights | |
| I/O 7 | 8 | ||
| I/0 8 | 9 | ||
| I/O 9 | 10 | ||
| I/O 10 | 11 | wire both wheel encoders | wire both wheel encoders |
| I/O 11 or P11 | 12 | ||
| P12 | SPARE 1 | GPIO connector | |
| P13 | SPARE 2 | GPIO connector | |
| P14 | SPARE 3 | GPIO connector | |
| P15 | SPARE 4 | GPIO connector | |
| P16 | AUX A | able to turn on battery voltage up to 5 amp | not yet but should be hooked to xbox kinect |
| P17 | AUX B | able to turn on battery voltage up to 5 amp | |
| P18 | AUX C | able to turn on battery voltage up to 5 amp | |
| fan port | 5v | ||
| Kinect port | 12v | ||
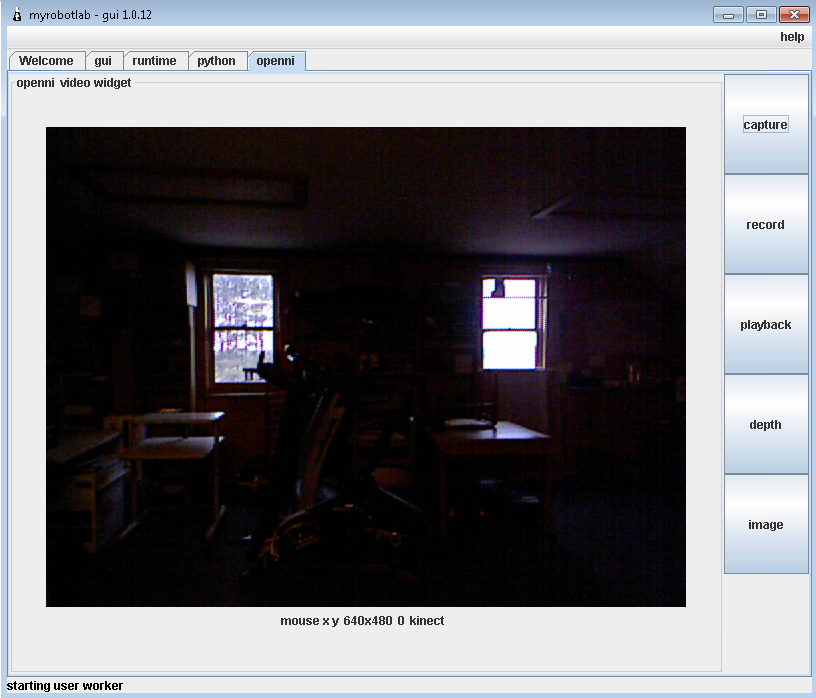
Azul's depth map & rgb camera through kinect is worky - so next step for point click navigation of platform is to send this RGB image to OpenCV. If a point was "clicked" the LKOptical filter would place an LKPoint in the RGB (mebbe IR) video stream - the distance of this point could be measured and the platform could be steered and moved to a closer position to the point. It concerns me a some that, although the kinect has a very good field of view compared to most cameras, the amount of floor we can see is very limited. This could be improved considerably with a tilt-able kinect.

.jpg)
.jpg)
Steady stream of IR & Voltage from ADC Sensors on the new Square Bot Base
I think a "point" and click navigation system would be possible with LKOptical track & the kinect - point and set "way-point" .. then leave it to the platform to get the point centered and at an expected elevation..
if its on the floor the point will descend with the horizon until its at the bottom of the video frame.. if you stuck the point on a wall - the IR & Ultrasonic will override when it gets as close as it can .. and if you put it on the ceiling .. then you are just mean
WE WILL BORG IT !!! I assume
WE WILL BORG IT !!!
I assume when we were talking you said a USB connection to (some parallax board) - Just need to find the API documentation on it (if it exists) .. otherwise its down to BeagleBoards & H-Bridges
Nice Build Harland - did it take long ? What were the good, bad, fun and not fun parts of building & operating it?
You mentioned MSRDS Microsoft Robotics Development Studio .. it seems to have died a sudden death..
Stuff is happening
Stuff is happening :
java -jar myrobotlab.jar -install
Stuff is installing Yay !
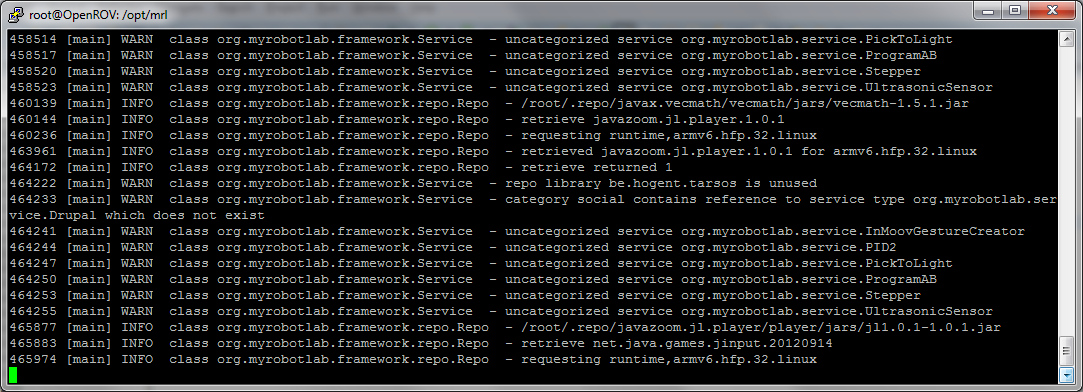
Bad news is any native libraries are armv6 YOUR BOARD IS BEING IDENTIFIED AS A RASPI .. GRRR .. will need to work through this one...
But its Progress !
More Progress Yay ! - ok ..
More Progress
Yay ! - ok .. now we are at least talking to another piece of hardware on the serial port - so this is a good baseline to show what is worky & what is not ..
We can now officially talk from the beagle-board to an Arduino. So I know MRL is using the correct native serial files, and the beagle bones usb ports are working.
I've put the Arduino in a state where its constantly sending back data, so I can disconnect MRL and verify other tools can read the data from a serial port. Once I do that we should be able to switch back to the parallax with confidence and a good tool pack
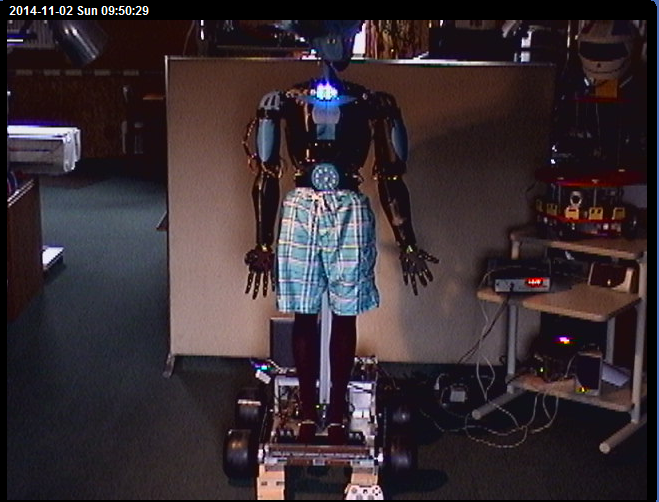
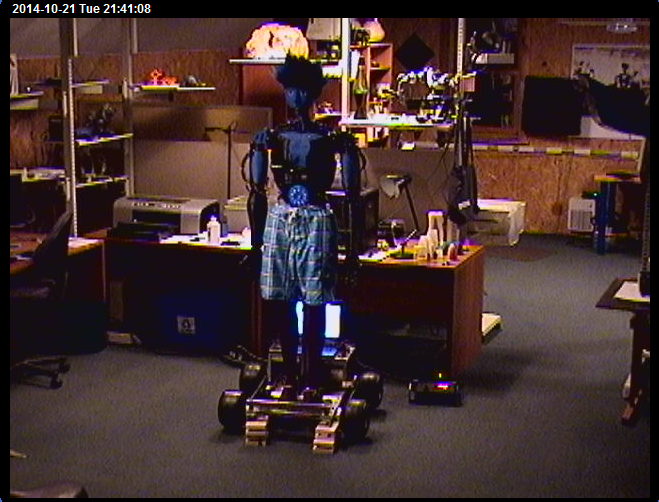
Looks so cool with legs. Very
Looks so cool with legs. Very neat Robot wow.