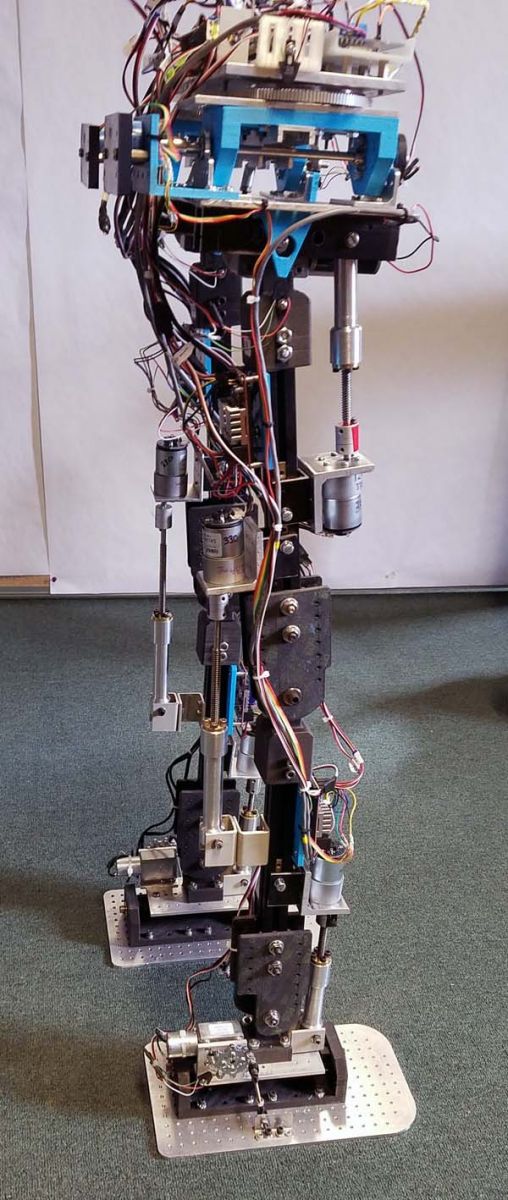
I started over on the legs. Learned some of what not works on the first set. New legs: the black is nylon-X, blue is ABS, gray is aluminum. I bought a Tormach CNC this summer and have been making some parts out of metal. Lots of fun and lots to learn. The gears and shaft couplers came from Serrvo City. I am still using RoboClaw motor controllers. There are 6 motors on each leg. 3 for hips, 1 for knee, and 2 for ankles. For the main support I used 1 inch square alum. (80/20). All parts are in CAD, Autodesk Inventor.  Don't have them working right yet. Grog, thanks for the help with the pictures.
Don't have them working right yet. Grog, thanks for the help with the pictures.



Wow ! Great Design & Post
Wow ! Great Design & Post Harland !
How much do they weigh ?
They look really solid.
What is the max angular speed ?
And look at all those nicely formatted pictures !

This looks really
This looks really nice Harland,
Will be very interesting to see the first video of them :)
Looking very good! Looking
Looking very good! Looking forward on watching videos of it doing the shuffle.
Any idea about proximate cost?
And I know they cost a lot but ever thought about linear actuators?
Wow
They look great,
It looks like the foot is narrower than you first version.
Can't wait to see them walking
These actually look like they
These actually look like they could work.
Great work! & Please keep us posted!
some info on questions
Not sure how fast, don't have it working, but the new design makes it easer to change the size of the motors. The motors are mounted on the outside. Currently one mega bd. contorls everything and I see delays on reading motor boards and sending the next command. Maybe it should be more like the inmoov body one board for each leg, and MRL does the heavy lifting. I will need several types of sensors to keep it upright, to make decisions on controling the motors. Pressure sensors on the bottom of the feet.
weight of legs and hips 27.5 lbs. 12.5 Kg, used bathroom scale