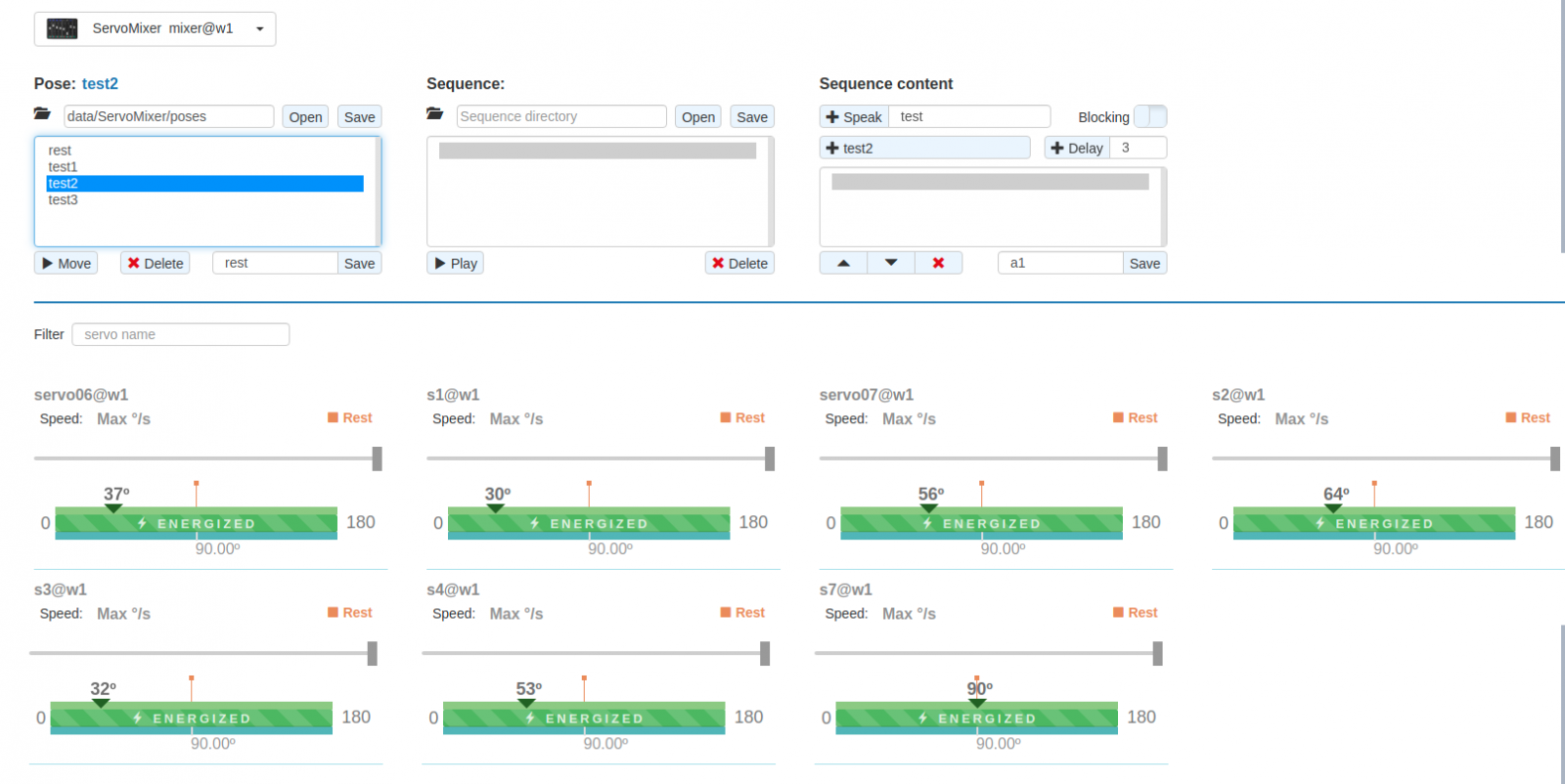
General purpose service to orchestrate servos.
General purpose service to orchestrate servos.
# TODO: Implement this script fpr servomixer = runtime.start("servomixer","ServoMixer")...
!!org.myrobotlab.service.config.ServiceConfig listeners: null peers: null type: ServoMixer