MyRobotLab uses a ROS bridge for interoperability. The sequence to get this setup is pretty simple. Start by installing ROS.
Then install and create a rosbridge .
When running any ROS service you always need to remember to source the setup script.
source /opt/ros/<rosdistro>/setup.bash
To start a ROS bridge run the following commands in a terminal.
sudo apt-get install ros-<rosdistro>-rosbridge-suite
roslaunch rosbridge_server rosbridge_websocket.launch
To run the turtle sim copy the following commands into another terminal.
source /opt/ros/<rosdistro>/setup.bash
rosrun turtlesim turtlesim_node
And to control the turtle with the keyboard.
source /opt/ros/<rosdistro>/setup.bash
rosrun turtlesim turtle_teleop_key
This should get you setup so myrobotlab can connect to ROS and we can start sending data back and forth.
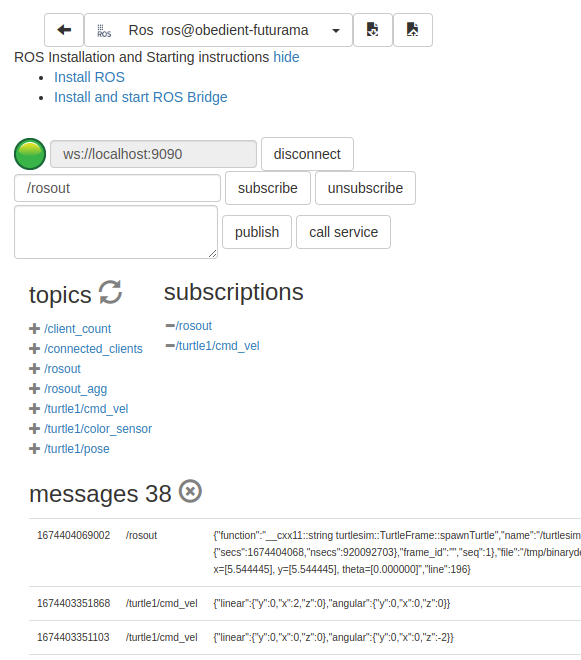
From the UI you can subscribe to ROS topics and publish messages or call ROS services.
You'll see the messages appear when you subscribe to topics that other services are publishing to. In this case, when I press some of the arrow keys (you must do this in the teleop terminal) - you'll see messages appear to move the turtle in the desired direction.