LadyBot is my robotic head which I am working for long. She has 3 microprocessors and 5 servos for the animatronic movements. One Arduino is dedicated to webcam and MyRobotlab to track faces. One for the head movements. Now I added voice recogrition and interaction via bluetooth. She responds with some predetermined sentences on a MP3 player, command and interaction using android bluetooth app which converts text to speech and vice versa.
Next version 'Nixie' is coming soon !
Help us to get ready with MyRobotLab version Nixie: try it !
There's been some refactoring of OpenCV to expose a method on it that allows you to pass in a custom frame grabber directly when you tell opencv to start. This means we can programmatically control the settings on the grabber
Here's a small python example of creating a frame grabber, intializing it with the filename and the api preference and then
 |
 |
Lets keep organized, do some research, and define some requirements & a plan for the "Ogre" release of MRL.
So of late I have become disenchanted with having my InMoov robot Willie ask me for information so he could send a text or place a call. It seemed to me that this might be a good thing to do if he just would do it but there were a few odd things. For one thing I had not asked him to do these things. For another after some babbleing and meaningless gibbertish he would not do so.
Yay for Nixie !
Yay for Maven and integrated Ivy !
This appears to be working (some bugs still need to be flushed out - but this was the major new functional objective for Nixie. Several other things got implemented or partially implemented in this release, but now is the time we are switch our mission and go FULL ON BUG HUNTING....

I would like to use a device with MRL that is serial and I cannot figure out how to set DTR and RTS. The device is optically isolated and steals power from the PC. It needs DTR (pin 4)to be high and RTS to be low (pin 7 on a 9 pin serial connector). The signals don’t need to cycle.
The Meetup in Paris in my Workshop!! (21/06/2018)
We had so much things to talk about...
It was really great to have Greg, his family, his friends in our place for a memorable moment.
Anthony, Bruno, Régis also joined the party!
Anthony got some super beers for all of us, but we forgot to drink them, so busy we were talking.
Can you believe that !!!
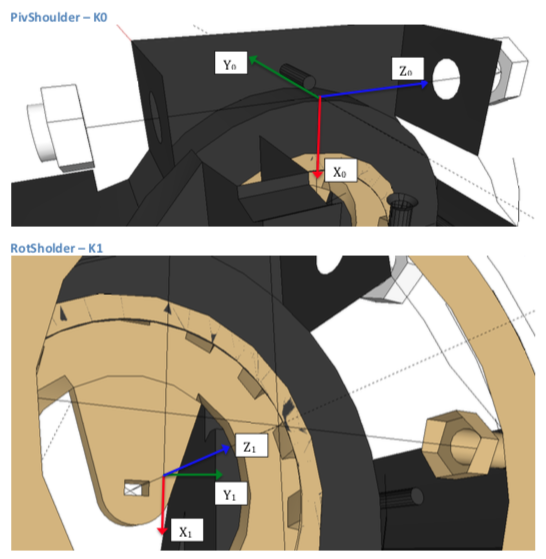
To make better use of the InverseKinematics service, I startet defining the necessary parameters for the right arm, according to the Denavit-Hartenberg convention.
For this task, I used the 3d InMoov V1 SketchUp-Model https://www.thingiverse.com/thing:1995318.
First, here is the definition of coordinate systems:
Omoplate & Shoulder
My kinect intégration.
Almost cooked, this is very inspired by InMoov service, for a universal service, for the next InMoov service...
Kwatters pointed the interest to use a tree to identify the skeleton. I have no more cofee, but I learned cool things!
What is the goal