I started over on the legs. Learned some of what not works on the first set. New legs: the black is nylon-X, blue is ABS, gray is aluminum. I bought a Tormach CNC this summer and have been making some parts out of metal. Lots of fun and lots to learn. The gears and shaft couplers came from Serrvo City. I am still using RoboClaw motor controllers. There are 6 motors on each leg. 3 for hips, 1 for knee, and 2 for ankles. For the main support I used 1 inch square alum. (80/20). All parts are in CAD, Autodesk Inventor.
Next version 'Nixie' is coming soon !
Help us to get ready with MyRobotLab version Nixie: try it !



I placed the Sensor rig into a cardboard box just to get a feeling for the data.
This is two passes of the probe, so you can see the slight variance in data.
Overlaying the raw data for 180°.... this was with GIMP so its just approximate
all looks kinda good except Hmmmm.... rounded corners cannot be explained...
another scan with DVD's :-
I have never mastered moving pictures to my form posts in MRL. It seems I need a drive to save them to and then post the link to the picture of that drive. If I save pictures of my new legs to my google drive. How do I post them to the MRL form. What is the of the statement or link I need to add? Or is there a better way?
thanks, harland
Hello,
Please I need help with my InMoov,
everything was working ok until recently when I started my start_INMOOV but myrobot lab get stuck with this message from the command promptsnip

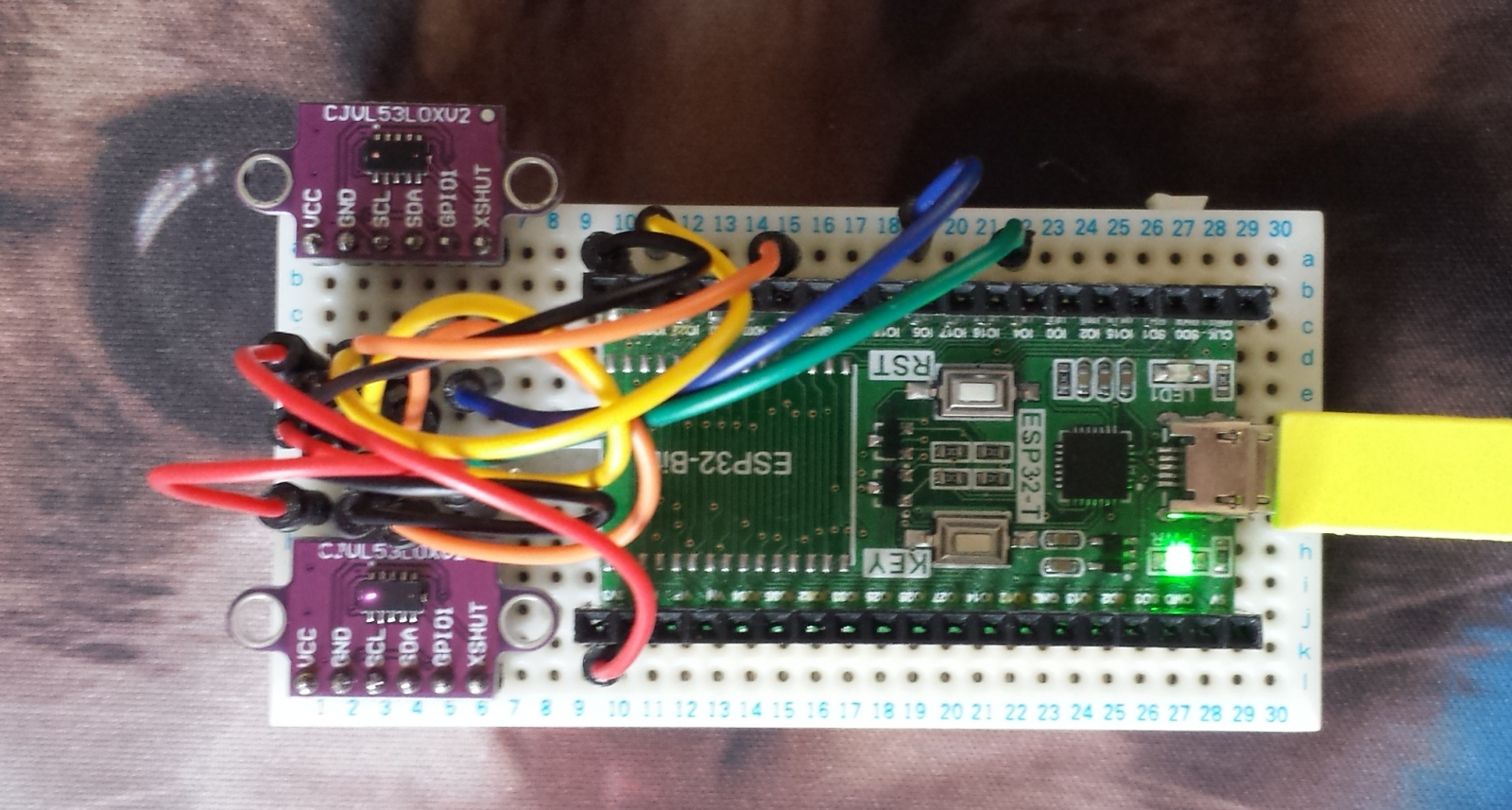
Its scanning, the stealthy Dual Time of Flight wiring was a soldering pig to execute (or should I say "Exterminate").
Data is flowing.... at momo a bit strange 200 Steps = 360° (until microstep instigated giving theoretical 1/16 steps ermm if my maths is correct 3200 Steps for 360° however at the price of speed)
hello ...i am building INMOOV and ,,i am starting the eyes installation ,,and i already bought a LifeCam 3000 HD Microsoft for head traking,,,,,the question is : should i buy and install a second cam for YOLO aplication for objects recongnition,, right now
Two is better than one...... (or 4 or 8 etcetcetc).
Following successful experiments with 1 single Time of Flight distance sensor mounted to Stepper, watching the scan process its seems to lend its self to setting the scan to just 180° and mount two sensors back to back to extract the whole 360°...... (or 90° scan with 4 sensors, hope you see where I am going with this :-)
Alex , they beat you to the dancing bot :)