sudo apt-get install xboxdrv
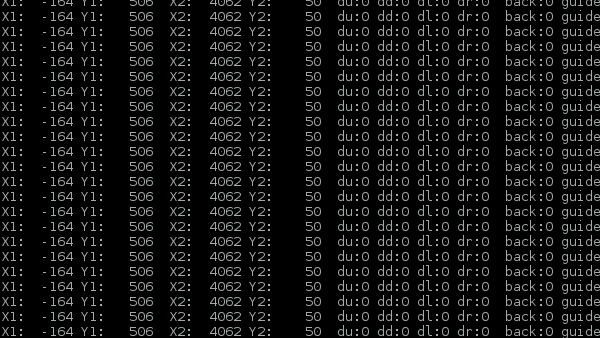
To get the values of joystick buttons printed on screen just run the driver:
sudo xboxdrv
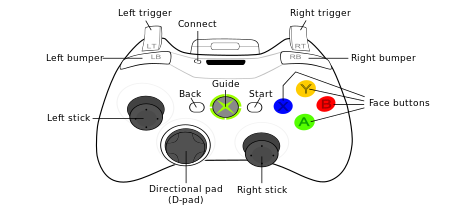
But I’m having some little issues with the inputs of joystick on the MRL Joystick service. First issue is with the analog buttons LT and RT.
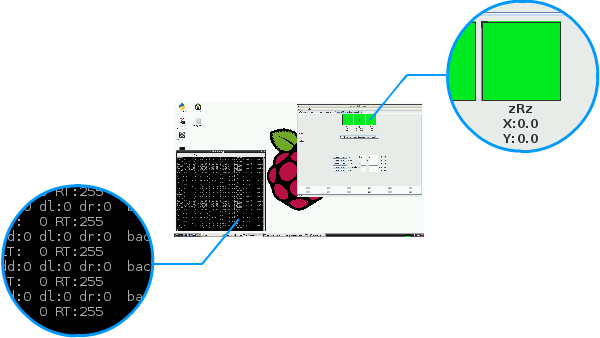
On Windows the values of LT and RT are shown on the zRz axis, being 0,996 the value of LT full pressed and -0,996 the value of RT full pressed.
Althought the values are being printed on the screen of RasPi running the xboxdrv, on the MRL joystick screen the zRz don’t change (it’s not getting the values of the joystick).
The next issue is with the digital button Start and the left and right digital thumb buttons. When pressed, is not shown "button in yellow" for it.
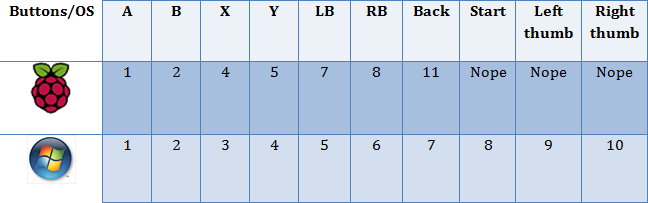
Other thing (that's not a big prooooblem) that concerns me a bit when I think about of "standardize" code for all users using different OS, is that the buttons of Xbox joystick have different MRL correspondent numbers in Windows and RasPi. See below:
Other things I would like to suggest:
- Since the Xbox 360 controller and the PlayStation 3 controller (And I believe many others) have two analog sticks, would be nice to have another XY axis on the joysticks service, to explore the maximum of potential of the joysticks;
- Split the zRz axis into two buttons values. As I said before, the zRz axis show the values of the LT and RT analog buttons (at least for the Xbox 360 joystick). Being 0,996 the value of LT full pressed and -0,996 the value of RT full pressed, and 0 (zero) is the value of LT + RT full pressed at the same time (or any other position of the two buttons with the same "point", for example LT 0,500 and RT -0,500). This would help to explore the maximum of potential of this buttons.
P.s.: The attached file logfile_raspi_joystick.txt have the content of the log file (myrobotlab.log) of the session when I was working with the Xbox joystick on MRL (on RasPi :) ). Hope it helps! :)