This is a walkthrough on how to control Nema17 Stepper motors using an ESP32 Webserver.
In the example above I am using the local ESP32 webserver to control InMoov's neck screw via a Nema17 stepper motor and 3D printed Gearbox.
Controlling Stepper motors via a Wifi enabled webserver opens up an easy way to control remote devices. The information here shows how this can be done easily and at low cost.
Requirements :-
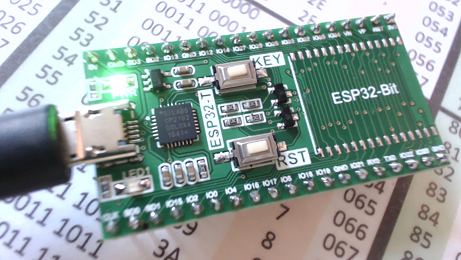
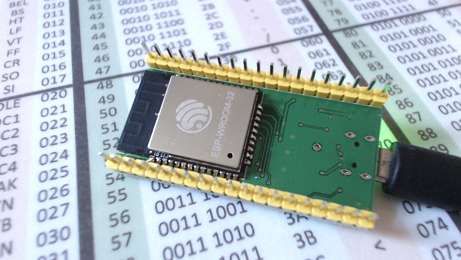
(1) Espressiff's ESP-WROOM-32 (plus some neat usb/button/pinout extender)
(2) Arduino IDE installed with the latest version of https://github.com/espressif/arduino-esp32
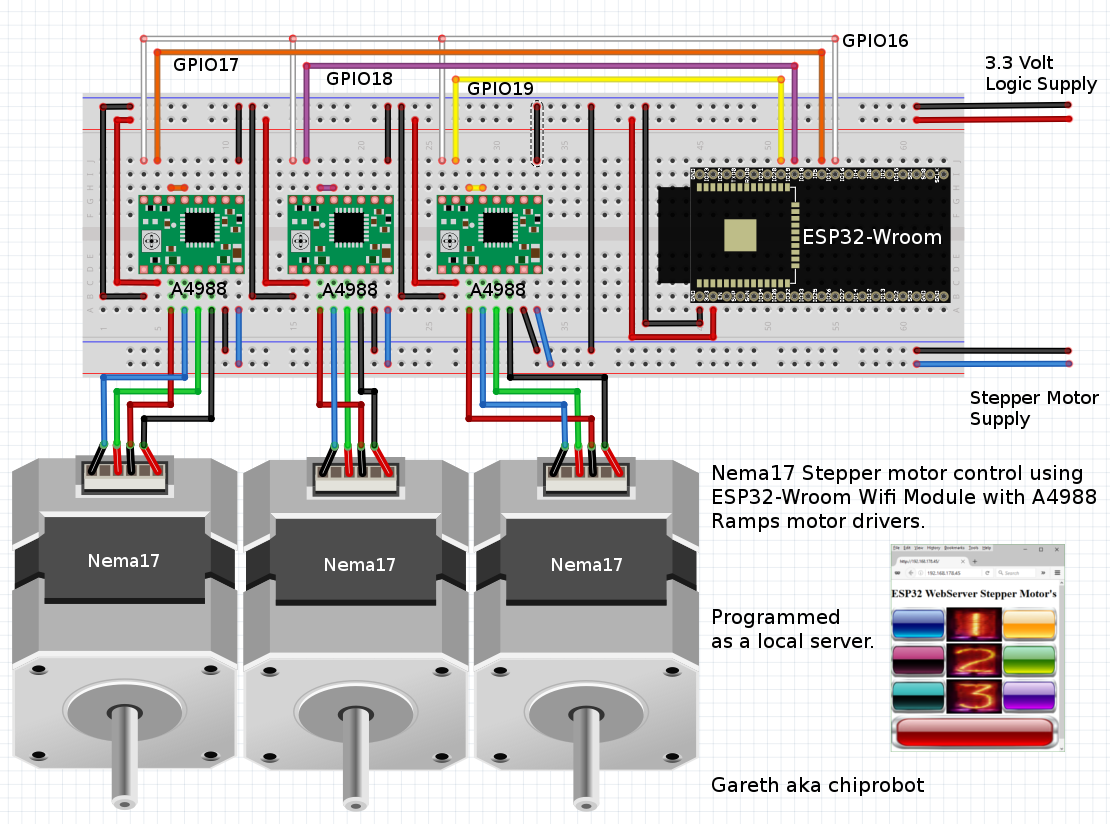
(3) The Circuit :-
To drive the Nema17 Stepper motors I am using cost effective A4899 Ramps modules
Gareth Cad :-
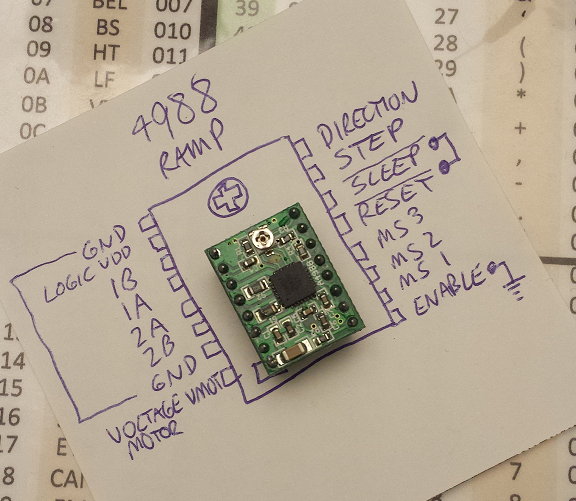
The full circuit :-
I think its correct (Citation needed)
(4) Code :-
This is set up for my application which means GPIO16 controls the direction of the steppers, and the GPIO17,18,19 controls the individual Steppers.
/*
#ESP32 Web Server with graphic buttons downloaded from web cache
Gareth aka chiprobot 21/3/2016
*/
#include <WiFi.h>
const char* ssid = "Place Wifi name here";
const char* password = "Place your Wifi password here";
int stepper=15; // stepper delay
WiFiServer server(80);
void setup()
{
Serial.begin(115200);
pinMode(16, OUTPUT); // set Stepper direction pin mode
pinMode(17, OUTPUT); // set Stepper1 pin mode
pinMode(18, OUTPUT); // set Stepper2 pin mode
pinMode(19, OUTPUT); // set Stepper3 pin mode
// We start by connecting to a WiFi network
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
Serial.println("Place this IP address into a browser window");
server.begin();
}
int value = 0;
void loop(){
WiFiClient client = server.available(); // listen for incoming clients
if (client) {
Serial.println("new client");
String currentLine = ""; // make a String to hold incoming data from the client
while (client.connected()) {
if (client.available()) { // if there's client data
char c = client.read(); // read a byte
if (c == '\n') { // check for newline character,
if (currentLine.length() == 0) { // if line is blank it means its the end of the client HTTP request
client.println("<!DOCTYPE html>"); // open wrap the web page
client.print("<html><head><meta name='viewport' content='initial-scale=1.0'><meta charset='utf-8'><style>#map {height: 100%;}html, body {height: 100%;margin: 0;padding: 0;}</style></head>");
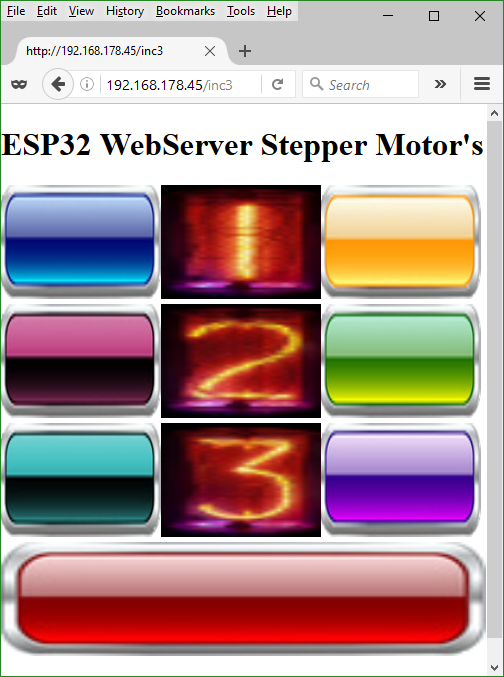
client.print("<body><h1>ESP32 WebServer Stepper Motor's</h1>");
// Gui buttons start here
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/ButtonBlueLong.png'onmousedown=location.href='/dec1' >");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/nixiesmall1.png'>");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/ButtonOrangeLong.png'onmousedown=location.href='/inc1' >");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/ButtonPinkLong.png'onmousedown=location.href='/dec2' >");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/nixiesmall2.png'>");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/ButtonGreenLong.png'onmousedown=location.href='/inc2' >");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/ButtonTurqLong.png'onmousedown=location.href='/dec3' >");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/nixiesmall3.png'>");
client.print("<input type=image style=width:33%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/ButtonPurpleLong.png'onmousedown=location.href='/inc3' >");
client.print("<input type=image style=width:100%;height:20% src='http://myrobotlab.org/sites/default/files/users/user25images/ButtonRedLong.png'onmousedown=location.href='/stopall' >");
client.print("</body></html>"); // close wrap the web page
client.println(); // The HTTP response ends with an extra blank line:
break; // break out of the while loop:
} else { // if you got a newline, then clear currentLine:
currentLine = "";
}
} else if (c != '\r') { // if you got anything else but a carriage return character,
currentLine += c; // add it to the end of the currentLine
}
// Check to see if the client request was "GET /H" or "GET /L":
if (currentLine.endsWith("GET /dec1")) {digitalWrite(16, HIGH);
for (int i=0; i <= 43; i++){ digitalWrite(17, HIGH);delay(10);digitalWrite(17,LOW );delay(10); }
}
if (currentLine.endsWith("GET /inc1")) {digitalWrite(16, LOW);
for (int i=0; i <= 43; i++){ digitalWrite(17, HIGH);delay(10);digitalWrite(17,LOW );delay(10); }
}
if (currentLine.endsWith("GET /dec2")) {digitalWrite(16, HIGH);
for (int i=0; i <= 43; i++){ digitalWrite(18, HIGH);delay(10);digitalWrite(18,LOW );delay(10); }
}
if (currentLine.endsWith("GET /inc2")) {digitalWrite(16, LOW);
for (int i=0; i <= 43; i++){ digitalWrite(18, HIGH);delay(10);digitalWrite(18,LOW );delay(10); }
}
if (currentLine.endsWith("GET /dec3")) {digitalWrite(16, HIGH);
for (int i=0; i <= 43; i++){ digitalWrite(19, HIGH);delay(10);digitalWrite(19,LOW );delay(10); }
}
if (currentLine.endsWith("GET /inc3")) {digitalWrite(16, LOW);
for (int i=0; i <= 43; i++){ digitalWrite(19, HIGH);delay(10);digitalWrite(19,LOW );delay(10); }
}
if (currentLine.endsWith("GET /stopall")) {digitalWrite(16, HIGH);
}
}
}
}
} |
Download the code to the ESP32
Start up a Serial monitor @115200 Baud and press reset on the ESP32 board.
The serial monitor will show an IP address when the ESP32 connects to your Wifi network.
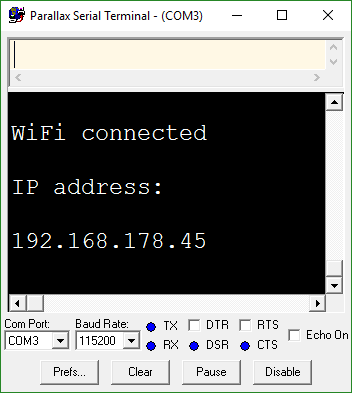
Place this IP address into a web browser and the ESP32's web Gui will fire up.
Press the buttons to control the steppers.