
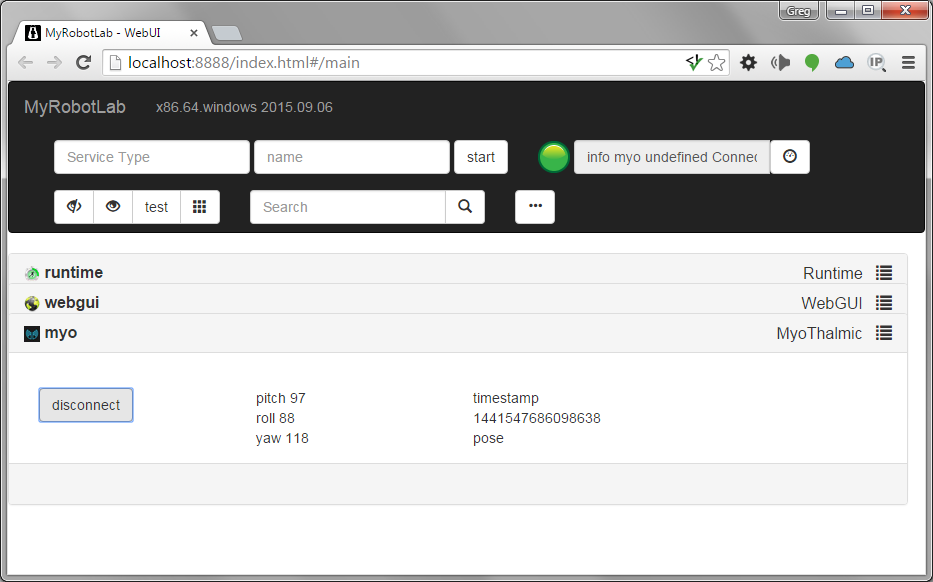
MRL WebGUI

|
Pose |
Description |
|
REST
|
|
|
FIST |
|
|
WAVE_IN |
|
|
WAVE_OUT |
|
|
FINGERS_SPREAD |
|
|
DOUBLE_TAP |
|
|
UNKNOWN |
|
[[service/MyoThalmic.py]]
References
Example code (from branch develop):
from com.thalmic.myo import Pose
myo = runtime.start("myo", "MyoThalmic")
# start optional virtual arduino service, used for test
if ('virtual' in globals() and virtual):
myo.setVirtual(True)
myo.connect()
myo.addPoseListener(python)
def onPose(pose):
print(pose.getType())
Example configuration (from branch develop):
!!org.myrobotlab.service.config.ServiceConfig
listeners: null
peers: null
type: MyoThalmic