with the latest binaries and a a simple :
chumby:/mnt/usb-E0FD-1813/myrobotlab-0014# /mnt/usb/java/ejre1.6.0_25/bin/java - classpath ":myrobotlab.jar:./lib/*" -Djava.library.path=./bin org.myrobotlab.ser vice.Invoker -service Jython jython RemoteAdapter remote -logToConsole -logLevel DEBUG
I started a Jython & RemoteAdapter service without a gui on the Chumby in debug mode with logging to the console.
Without a GUI you say ?!? Yes.. Because we'll use a MRL instance on the windows box and connect.
This is through Putty on a Windows laptop
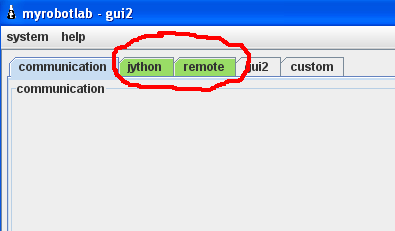
Now I just fire up a local MRL instance and connect to the chumby.
Next go to the gui tab and press the refresh (I should fix that someday).
And Shading ! Look the two remote services have appeared - jython & remote !
The nice thing about the jython service, is that it is a programming editor. So I can program the Chumby on my laptop, when I hit execute it sends the code to the Chumby to run ! Cool Yes !
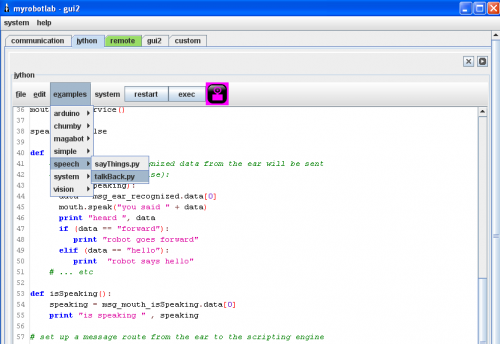
And look there is pre-loaded examples. I chose talkBack.py which is supposed to recognize some speech then speak it back. I tried to document the code heavily so others may feel free to "tweak" it to there liking.
I wonder if it will start talking to Ro-Bot-X (heh hee)
We'll see !
Ro-Bot-X .. If it has not made any sound yet please go over to the mic and say one of these "hello | forward | back | stop | turn left | turn right | spin | power off"