
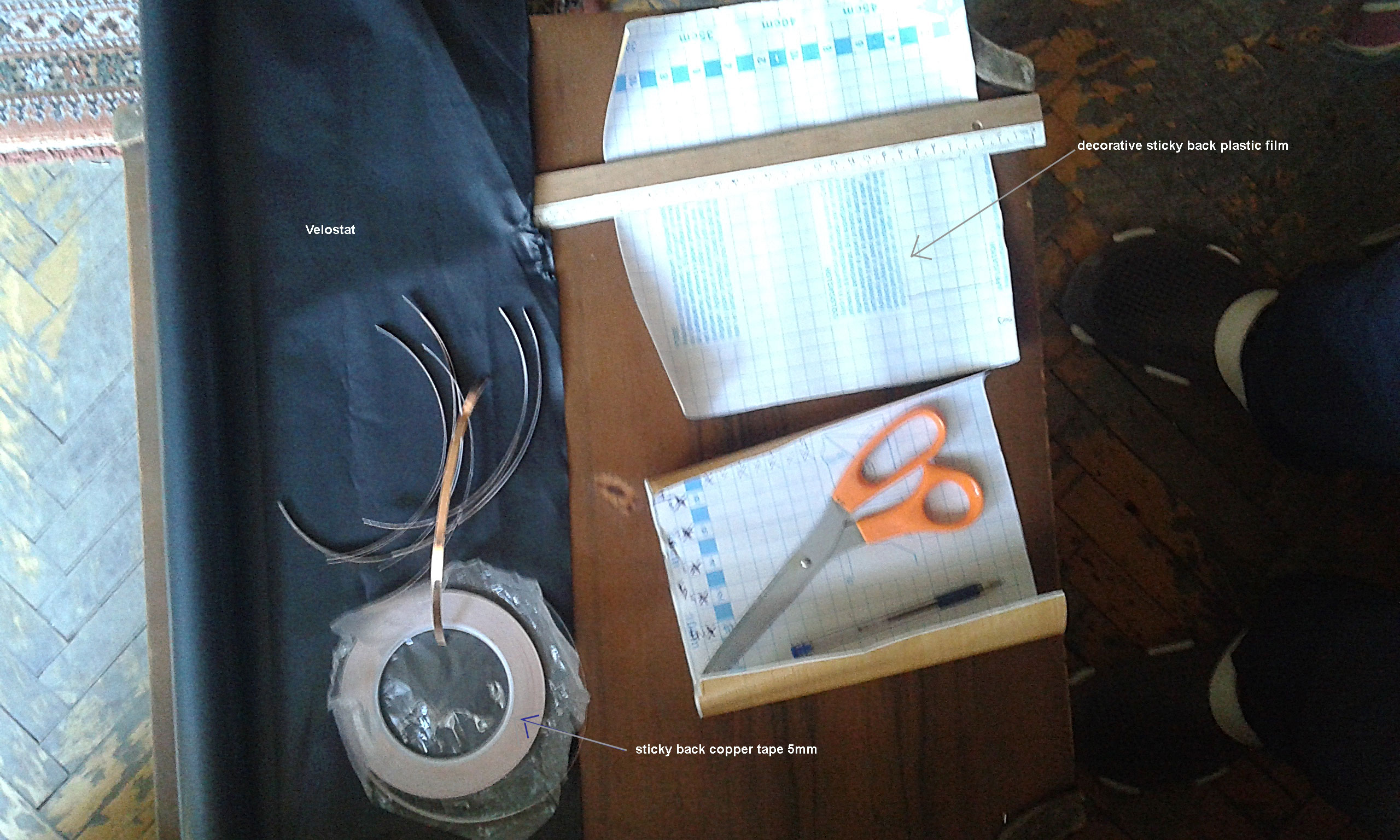
Inspired by the work of Markus and having a lot of background on DIY resistive sensors, I decided to make a different approach to creating touch sensitive robotic skin... The skin pad you see on above pic shows a pad 20cmx20cm 8bit matrix with 8x8=64 junction points controlled with 8 analog and 8 digital pins on Arduino... I made this matrix inspired with the work of Markus and another study here and here ... Check the below pics for the materials and construction...


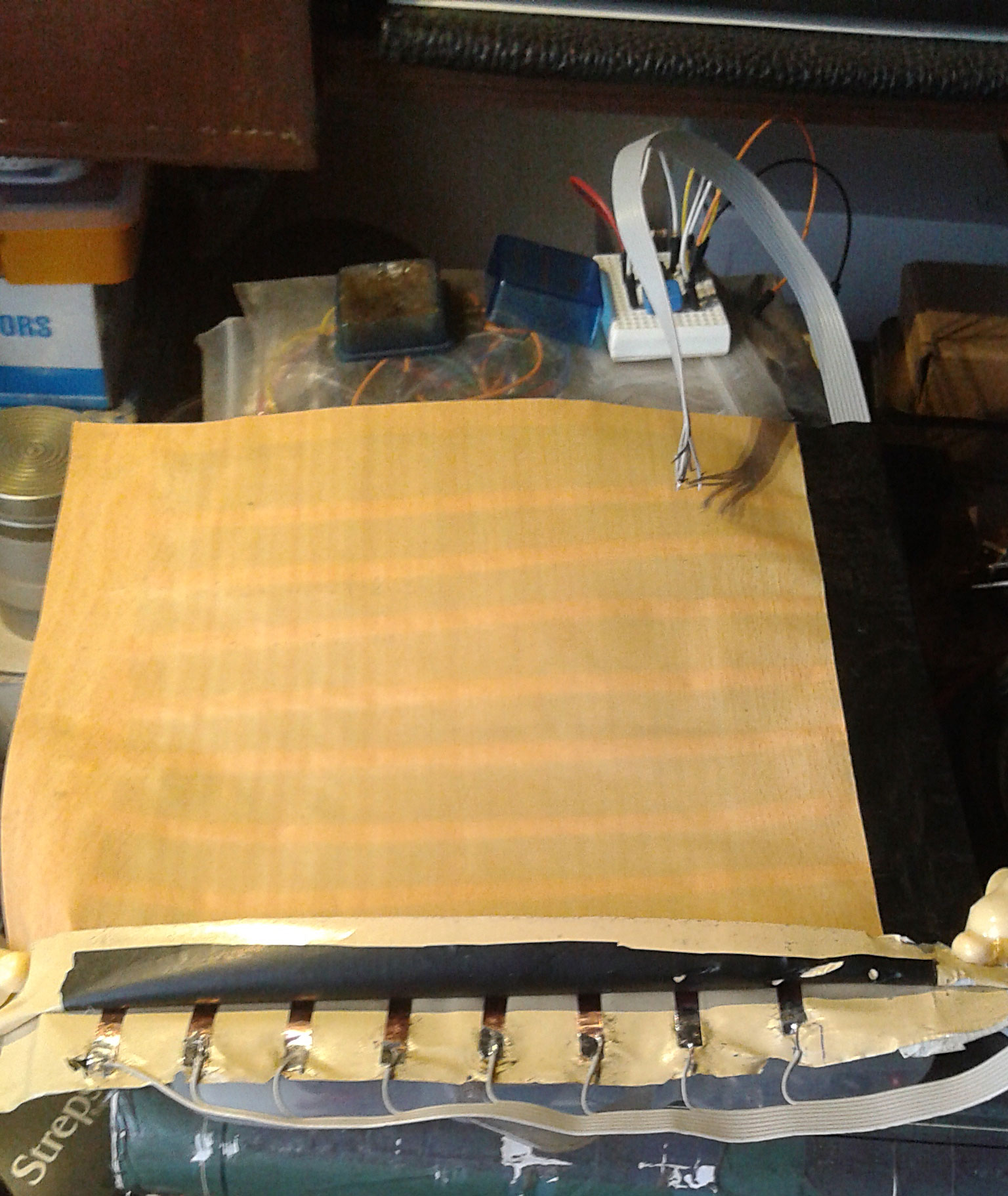
As you can see the final skin is very thin and flexible... Can be placed on any part of the robot... Around arms, legs or chest... It can be constructed at any size... The Arduino code for reading the sensor is written by me using a software 12bit ADC for increased sensitivity... I am trying to find a way for visualising the output on Processing.... I will post future improvements.... Arduino code is :
/*8x8 matrix read analog values of keypad at 12bit precisionReads analog inputs on A0-A5, prints the result to the serial monitor.Matrix outputs on digital pins 2-9Dincer Hepguler 2015*///include the library#include <eRCaGuy_analogReadXXbit.h>//instantiate an object of this library class; call it "adc"eRCaGuy_analogReadXXbit adc;//Global constants//const uint8_t pin = A0; //analogRead pin//const uint8_t pin = A1; //analogRead pin//const uint8_t pin = A2; //analogRead pin//const uint8_t pin = A3; //analogRead pin//const uint8_t pin = A4; //analogRead pin//const uint8_t pin = A5; //analogRead pin//constants required to determine the voltage at the pin;//BE SURE YOU USE THE CORRECT ONE OF THESE WHEN CALCULATING THE VOLTAGE FROM A READING! Take notes of how these constants are used below.const float MAX_READING_10_bit = 1023.0;const float MAX_READING_11_bit = 2046.0;const float MAX_READING_12_bit = 4092.0;const float MAX_READING_13_bit = 8184.0;const float MAX_READING_14_bit = 16368.0;const float MAX_READING_15_bit = 32736.0;const float MAX_READING_16_bit = 65472.0;// the setup routine runs once when you press reset:void setup() {// initialize serial communication at 9600 bits per second:Serial.begin(57600);//pin definitionspinMode(A0,INPUT);pinMode(A1,INPUT);pinMode(A2,INPUT);pinMode(A3,INPUT);pinMode(A4,INPUT);pinMode(A5,INPUT);pinMode(A6,INPUT);pinMode(A7,INPUT);pinMode(2,OUTPUT);pinMode(3,OUTPUT);pinMode(4,OUTPUT);pinMode(5,OUTPUT);pinMode(6,OUTPUT);pinMode(7,OUTPUT);pinMode(8,OUTPUT);pinMode(9,OUTPUT);//digitalWrite(2,HIGH);//digitalWrite(3,HIGH);//digitalWrite(4,HIGH);//digitalWrite(5,HIGH);//digitalWrite(6,HIGH);//digitalWrite(7,HIGH);//digitalWrite(8,HIGH);//digitalWrite(9,HIGH);}// the loop routine runs over and over again forever:void loop() {//Local variablesunsigned long num_samples=10;uint8_t bits_of_precision=12; //bits of precision for the ADC (Analog to Digital Converter)//float analog_reading; //the ADC readingfloat V; //Voltage calculated on the analog pin// read the input on analog pinsfloat sensorValue0 = adc.analogReadXXbit(A0,bits_of_precision,num_samples);float sensorValue1 = adc.analogReadXXbit(A1,bits_of_precision,num_samples);float sensorValue2 = adc.analogReadXXbit(A2,bits_of_precision,num_samples);float sensorValue3 = adc.analogReadXXbit(A3,bits_of_precision,num_samples);float sensorValue4 = adc.analogReadXXbit(A4,bits_of_precision,num_samples);float sensorValue5 = adc.analogReadXXbit(A5,bits_of_precision,num_samples);float sensorValue6 = adc.analogReadXXbit(A4,bits_of_precision,num_samples);float sensorValue7 = adc.analogReadXXbit(A5,bits_of_precision,num_samples);// print out the values you read as CSVSerial.print(sensorValue0);Serial.print(',');Serial.print(sensorValue1);Serial.print(',');Serial.print(sensorValue2);Serial.print(',');Serial.print(sensorValue3);Serial.print(',');Serial.print(sensorValue4);Serial.print(',');Serial.print(sensorValue5);Serial.print(',');Serial.print(sensorValue6);Serial.print(',');Serial.print(sensorValue7);Serial.println();delay(100); // delay in between reads for stability}
Great work! :-)
Great work! :-)
Thx...
Thx Markus... I realized that I have not added the connection schematics... Here it is: