Hey, guys! I haven't posted here in a while... but always taking a look at what's going on. I hope everyone is okay.
This is my latest project (mechDOG):
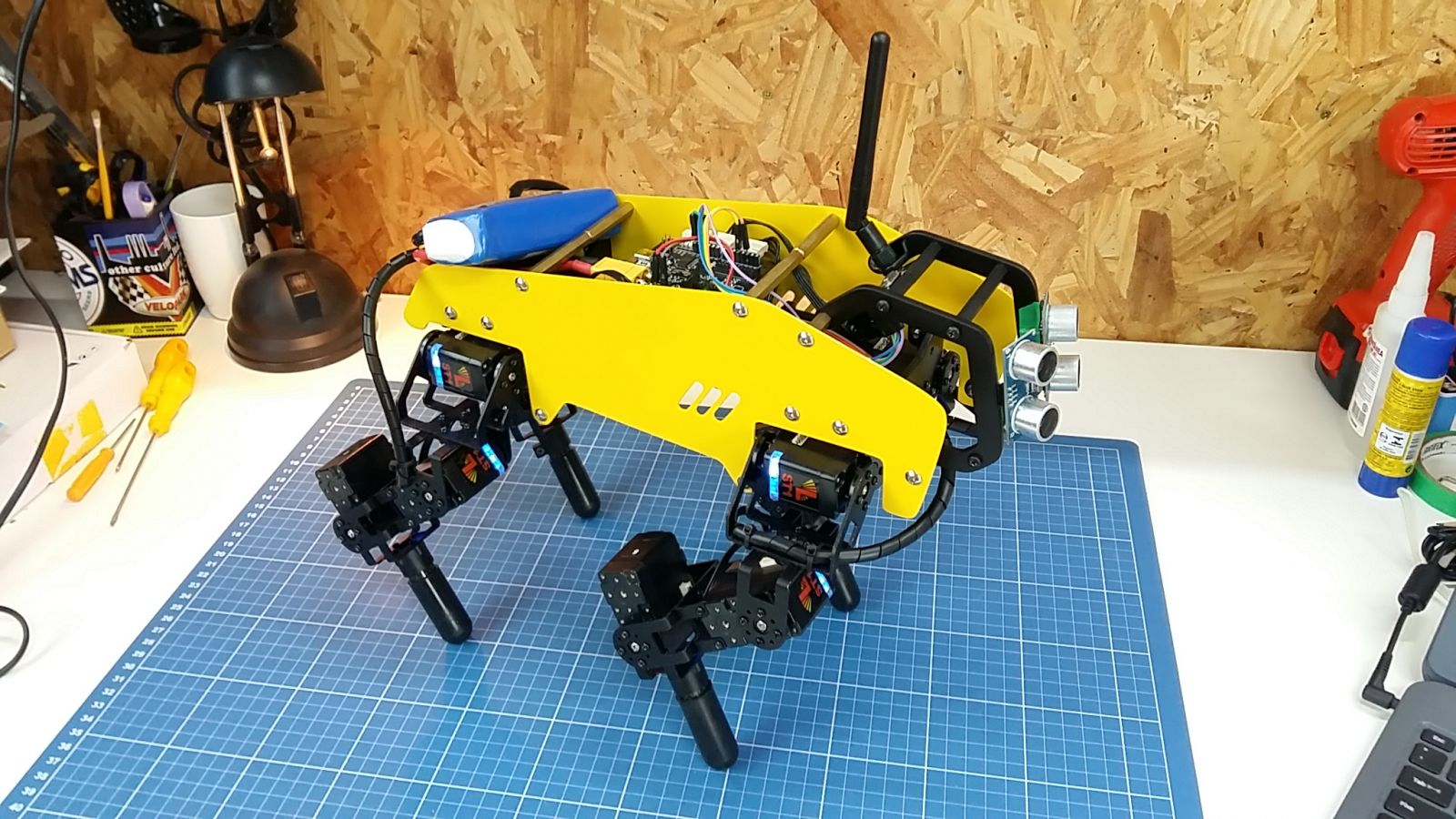
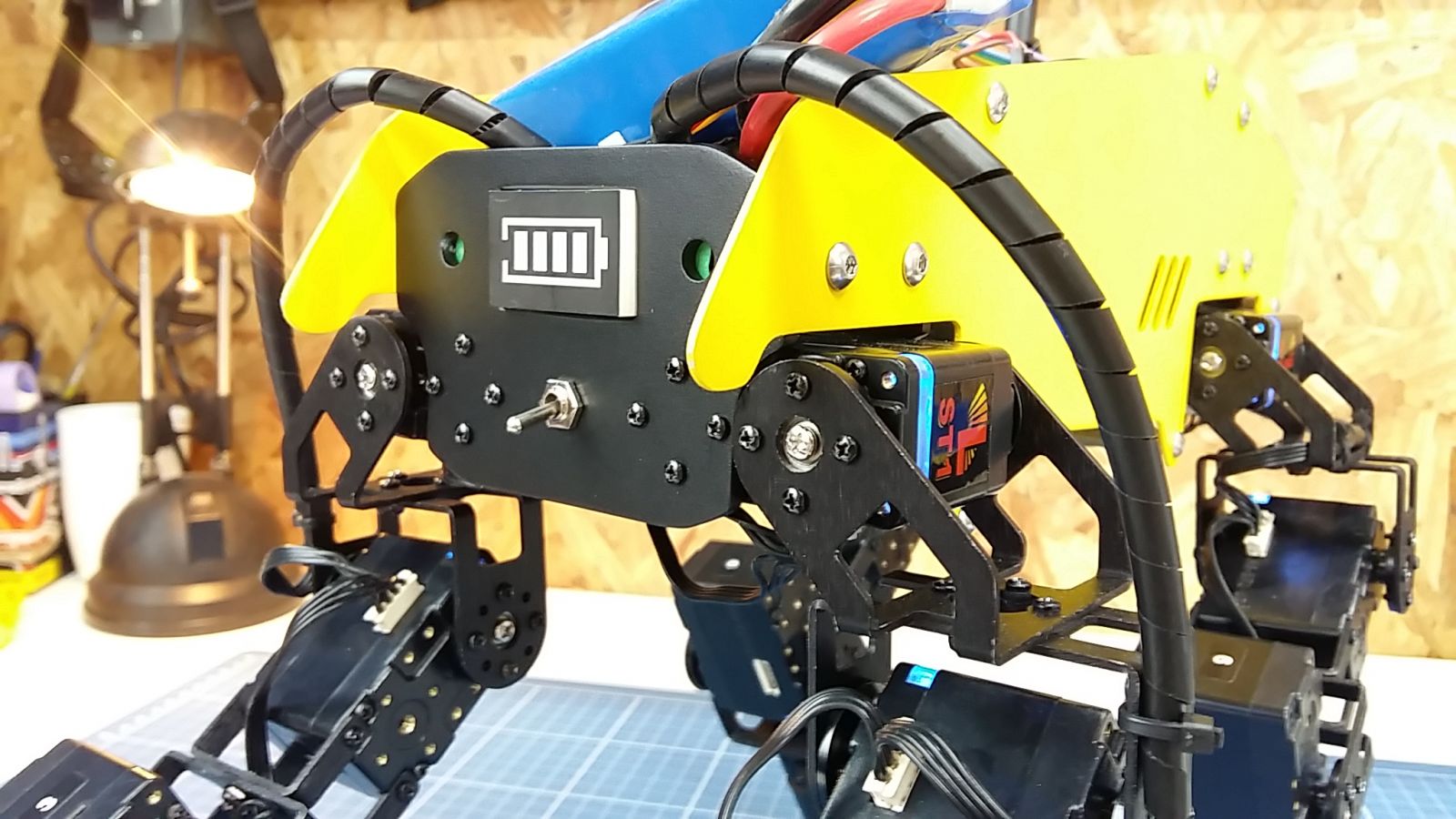
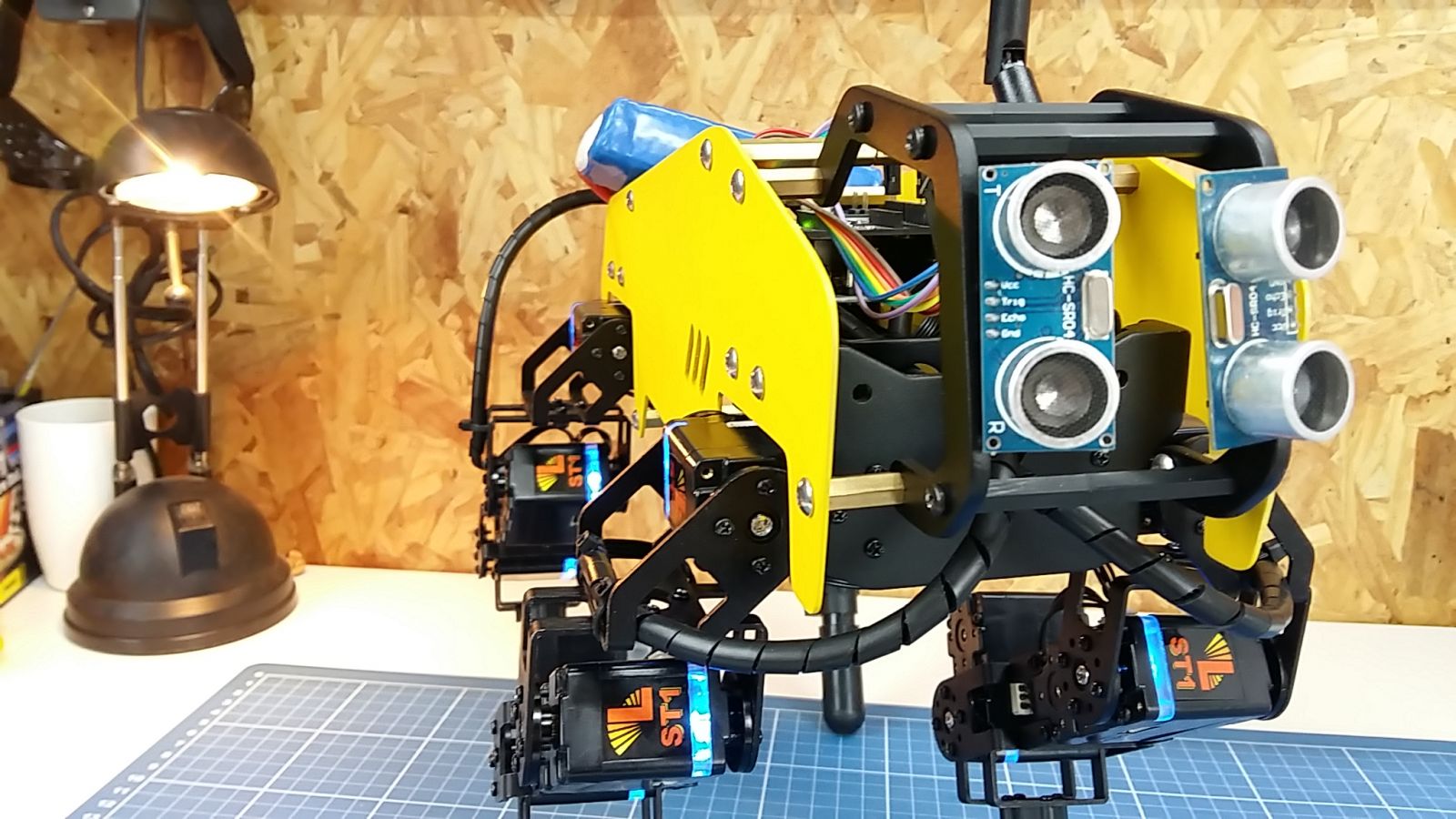
It is based on the new Lynxmotion Smart Servos (LSS), and it is currently controlled by an Arduino Uno with an LSS Adapter Board ( https://www.robotshop.com/en/lynxmotion-lss-adapter-board.html ) over it where the servo motors are connected.
I am planning a slightly larger and smarter version in which I intend to implement vision and more AI, in which I would like to run MRL.
Not having worked with MRL for a long time, I would like to know what would be the best small sized computer option to put in mechDOG and run MRL. Also, considering the servo motors interface (serial), what is there in the MRL to control them or what would we have to create to have them working?
Mech-Dickel ! Always great
Mech-Dickel !
Always great to see your amazing projects !
Not having worked with MRL for a long time, I would like to know what would be the best small sized computer option to put in mechDOG and run MRL
Jetson seems to be a popular choice kwatters has one.
We are
foreverstill working on the Nixie release of MRL .. but you should be able to utilize some of the new features for your projects if you use the develop releases.MRL's Servo is now just a control mechanism, its pretty straight forward to use or implement any "controller".
Looking at this :
https://www.robotshop.com/info/wiki/lynxmotion/view/servo-erector-set-system/ses-electronics/ses-modules/lss-adapter-board/#HUSB
Where is the USB serial packet protocol definition ? I didn't see it
The moving "gates" are implemented on your Uno now ?
Might be fun to try to load a simulator with a 3d representation of your new pet ;)
That is a nice project.!
That is a nice project.! Like the way it can move sideways. What is it programmed in?
Thank you! It's just Arduino
Thank you! It's just Arduino programming language (Arduino IDE).
Thanks, GroG! I was really
Thanks, GroG!
I was really thinking about Jetson.
Here is the page about Communication Protocol of LSS ( https://www.robotshop.com/info/wiki/lynxmotion/view/lynxmotion-smart-servo/lss-communication-protocol/ ), but nothing about "USB serial packet protocol definition".
Currently the function for walking gait is performed by Uno. The walk is based on "step phases". Each step has four step phases (four "small steps" to complete a step). To find the angles that each step phase needs to reach, I created a 2D model that simulates the legs, and with an on-screen protractor I obtained the angles.
To reach each step phase, the code has a function that calculates the difference between the target position and the previous position, and returns the increment in angles that must be performed.
Here is the page about
Here is the page about Communication Protocol of LSS ( https://www.robotshop.com/info/wiki/lynxmotion/view/lynxmotion-smart-servo/lss-communication-protocol/ ), but nothing about "USB serial packet protocol definition
Thats exactly what I was asking for .. the work would be to "Borg" this into MRL as a LynxSmartServo Servo Controller service.
Do you have a 3D model of your mech dog or can you create one? As I was saying we could begin putting it into the simulator, which might help with development too.
Thank you for your usual
Thank you for your usual responses and interest. Unfortunately, not able to create a 3D model right now. I'll try to put together everything I need first (Jetson... and I need more servos).