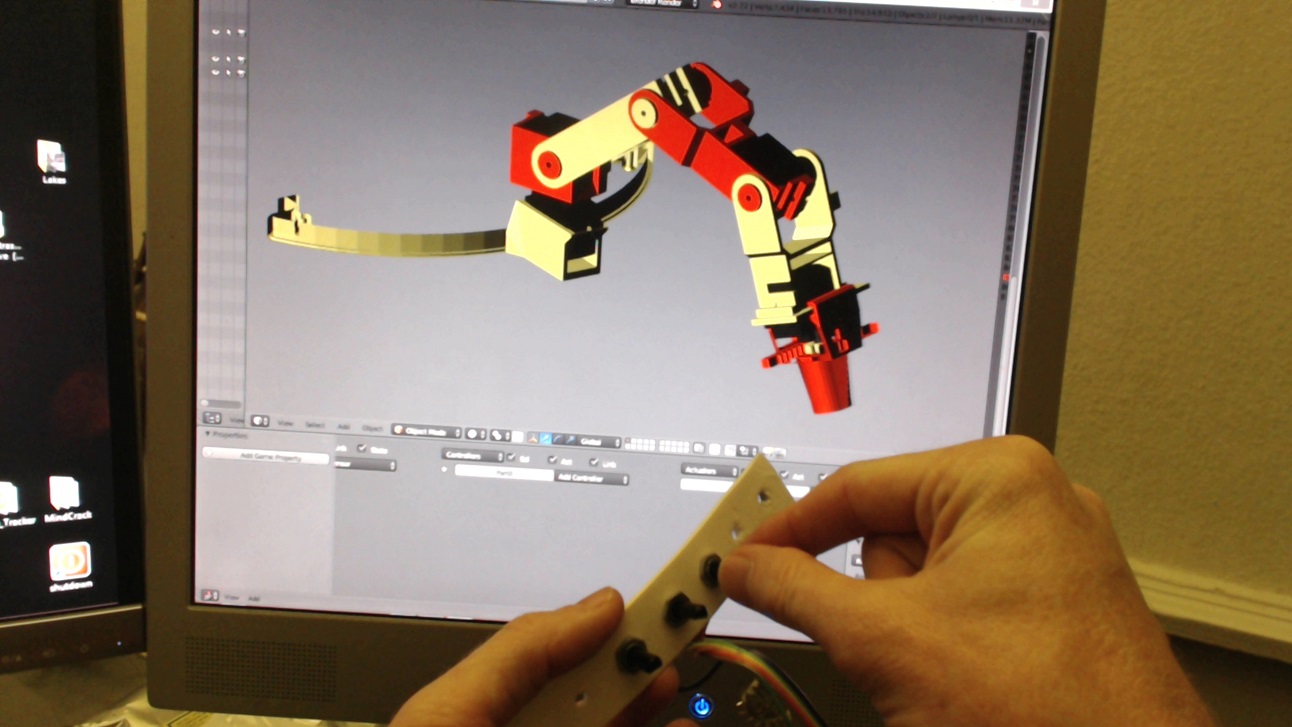
Have Just configured 4 Potentiometers to control my Blender Virtual Robot Arm.. Using a Propeller to TX four Analogs over a Serial link. Using Python code to control the actuators.
Each arm part is parented to next in the chain , meaning that they are all connected as one limb however able to turn on its parents axis.
..... Gareth would like to see a "complete" InMoov (in STL format) i.e. In full built form.....Is one out there?
(Its would save me a lot of work having to alighn one from all the bits 8P ).
I believe Gael uses Blender
I believe Gael uses Blender to design InMoov and I've seen screenshots of it in assembled form I think. I know I've seen other people have assembled the parts to create some of the assembly guides.
Any chance you can make heads or tails of the ROFI blender file. I installed Blender today and looked at the file. The whole robot is assembled in there complete with wires.
At the bottom of the page in the Files section you'll find a link to the Blender file on Google Docs. http://www.projectbiped.com/prototypes/rofi (https://docs.google.com/file/d/0By_h1KTMNaWNME14bGpIakJGRmc/edit?pli=1)
Checking....
Wow the ROFI is interesting file..... (strangly slowish to animate, not sure why yet, will have to delete a few layers). However Yes indeed its possible to rig.... though feedback position would work well for ROFI ie to set up walking gaits in the overworld and then play them back in the underworld if you know what I mean.
I have just installed 8 Actual Potentiometers to my Blender system so will have a go at binding the virtual servos.
....G
.
Taking shape..
First part is looking promissing.
This is just a screen grap of the live rigged part.... have to work out way of rigging the Elbow servo (hmmm .escapes me at moment as it has two pivot points)
now for the fingers.
...and the control Potentiometer bank that feeds my Propeller
Analoge control bank..... needs an upgrade.... however works for test phase...
I hope this will do for now,
I hope this will do for now, Gareth:
https://drive.google.com/file/d/0B4UWbgEG77SkRlMtLUtuVjREWlU/view?usp=sharing
I don't have a full assembled InMoov on my Blender files, because it too heavy for my computer to work on, it crashs the PC. So I work by segments, also some parts don't even exist on my files because they were mirrored from the opposite side with Netfabb.
.Holy moley ....... it has the chest and head too ....
Respect ..gael
Good that I left (the below) to think about over night.....
... as I had started to separate all the hand files and was too tired to reorientate them.....
...and then you sent the arm complete .... wow that will save a lot of work....YAY° a lot of work.....
.....G checks the file............
......Holy moley ....... it has the chest and head too ..... (only hand fails (no worries ..see below)).
...Its really strange why I decided to prepare the hand last night (albeit the Left one...(searches mirror tool)).
I am now, really looking forward to see how we can bind as many virtual Servos to it as possible and see how viable it is to control and interact with MRL (i think Greg has a few strings/direction to check/digest).
I don't know (Yet) enough about sending data from Blender to Robot ... (just because of the speed of things currently happening), as the "Pose" mode in blender may be able to help out...
Best Regards
Gareth