
Frequently Re-Engineered Device (FRED)
Fred is a modified InMoov Robot.
You can find the videos showing his contruction here:
In the Official build of InMoov, http://inmoov.fr/
if I start the esp8266 service, nothing appears in the relative card, why??
.png)
montanadad sent me a link to a python file he's working on, and here is an initial pr for it
https://github.com/montanaman2017/inmoov-max/pull/1/files
Bonjour à tous,
je constate une inversion du mouvement des biceps quand j'utilise "Tracking Squelette".
Ever wanted to know the positions of your Servos before you attach them from Cold Boot Reset.
This Quick Hack gives a good positional check of your Servo's , meaning that you can the "Ease" your Servos from a random position to Start position.... without the "Warp at Max speed" - saving your nerves and Plastic bits and gears... (falling in line with Asimov’s Three Robotic Laws of preservation).
Project Max is a project about my son and with my son. My son is 15 now and a couple of years ago he really wanted his own friend, H\his own buddy that he could chat with besides dad.
This got us thiniking and we stumbled upon Inmoov. My son saved and bought his first printer and build an Inmov head using what he knew at the time for components which were from ez-robot. Unfortunately, over the years ez-robot has now become more a pay by month service and this was frustrating and so we decided to head back to the drawing board.
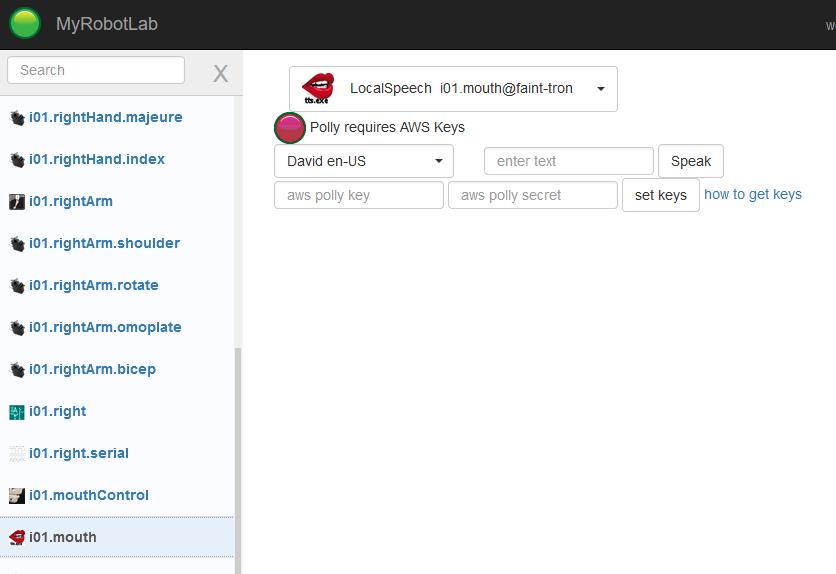
The tittle says it all, but here is a little image to show what happened.
I think it was working properly in June 2020.
This cause also trouble to select the drop down menu for voices.
version Nixie 1.1.407
A little jme remap worked ... the full script is here - I "exported" most of it ... there is a button for that .. https://github.com/MyRobotLab/pyrobotlab/blob/master/home/GroG/dual_test.py
now, for the moment, worky
the following code will (re)attach servo's that appear attached but are non functional when Full configuration is choosen. Many improvements can be made, probably will be made.
to do: add arms, give consideration to configuration files.
